
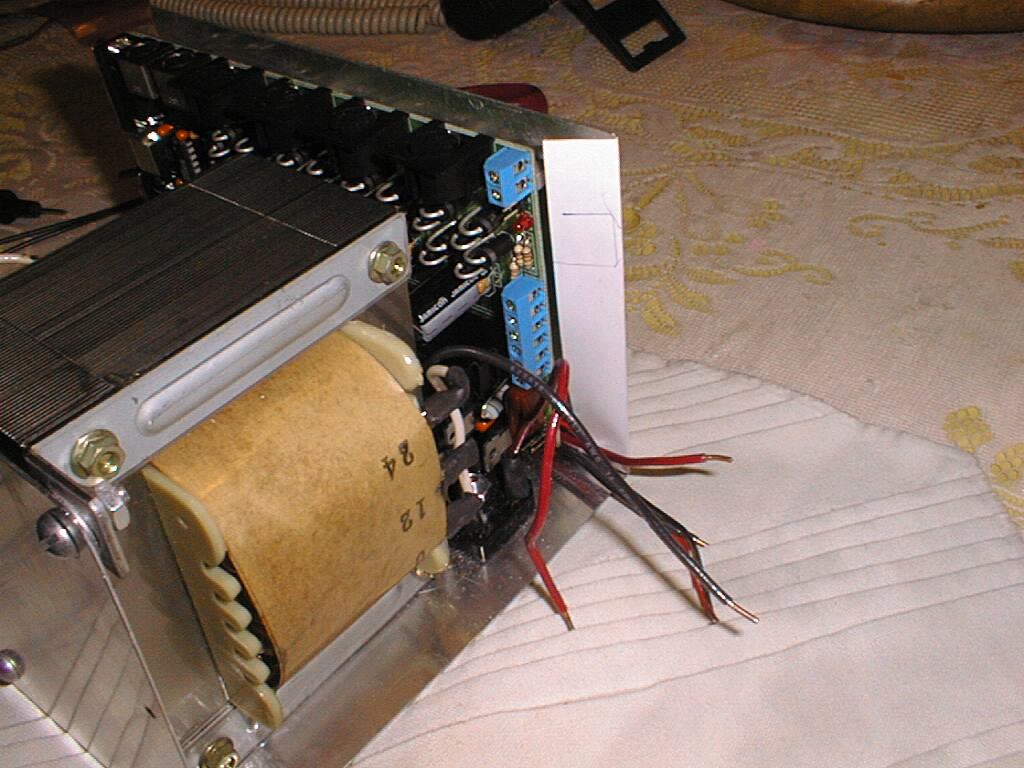

This is a portion of my CNC motion control board assembly documentation.
This is where I do some miscellaneous tasks:
|
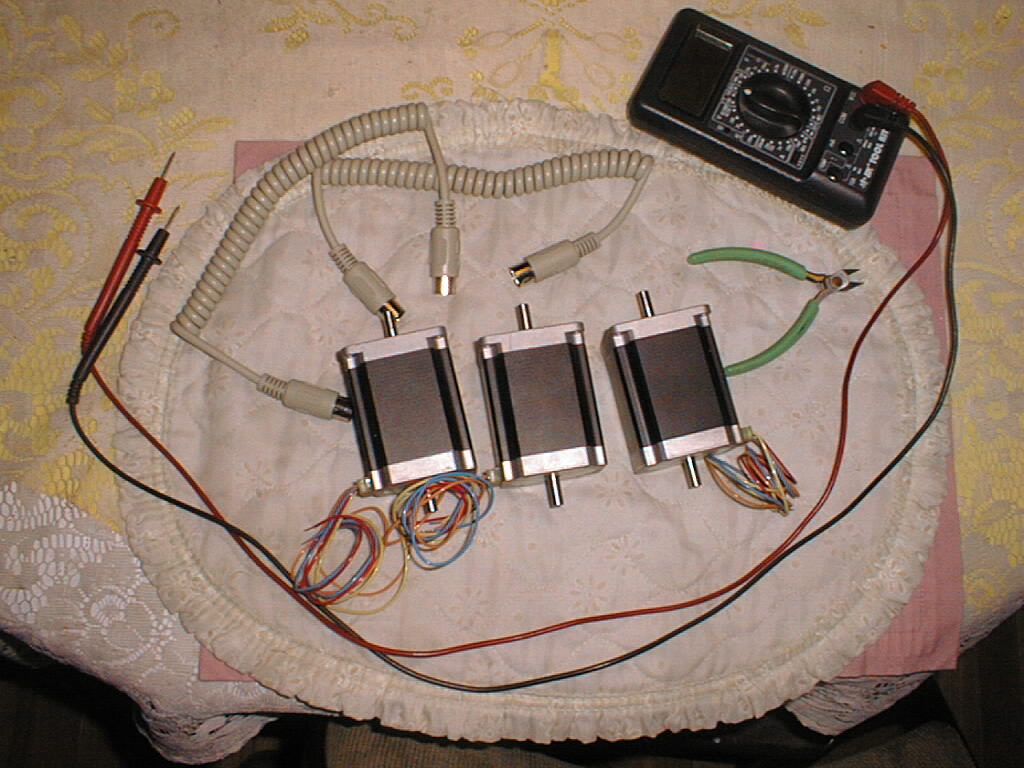
| This picture shows all the stuff I used to attach the stepper motors to DIN5 connectors. The DIN5 connectors come off of a male to male DIN5 cable, since I can not seem to find DIN5 male connectors stand alone in a catalog. The volt/ohm meter is used to figure out how to which pin of the DIN5 connector goes to which color of the cable. |
|
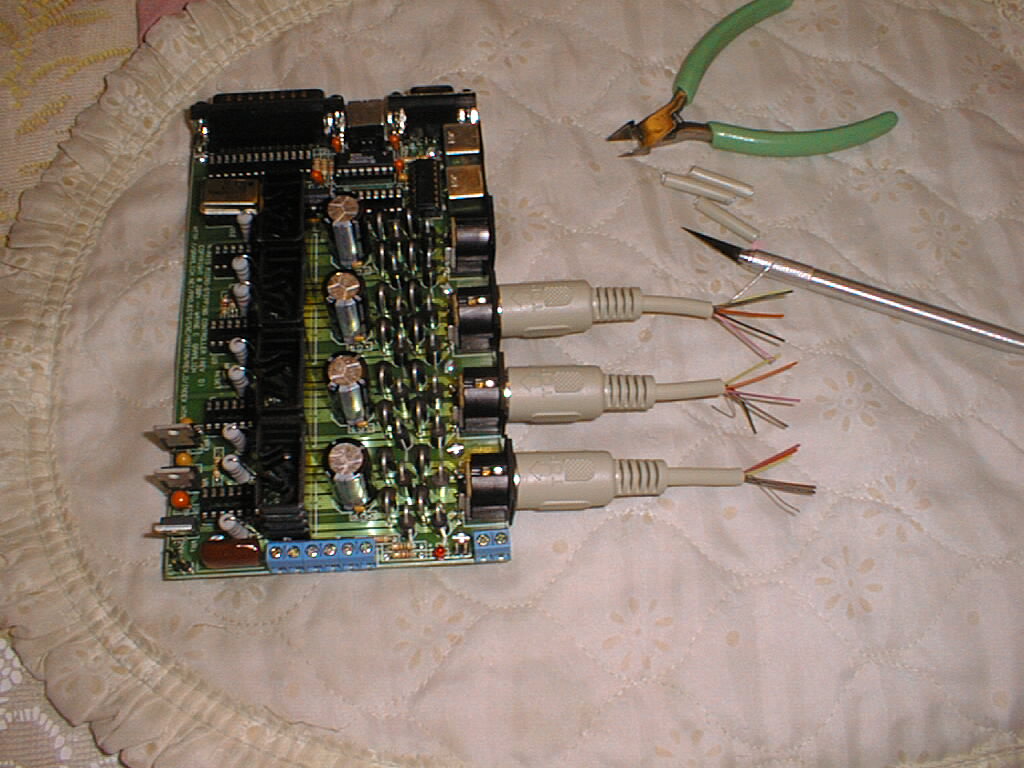
| This picture shows three of the DIN5 connectors snipped of the cables, wires sticking out, stripped and twisted. |
|
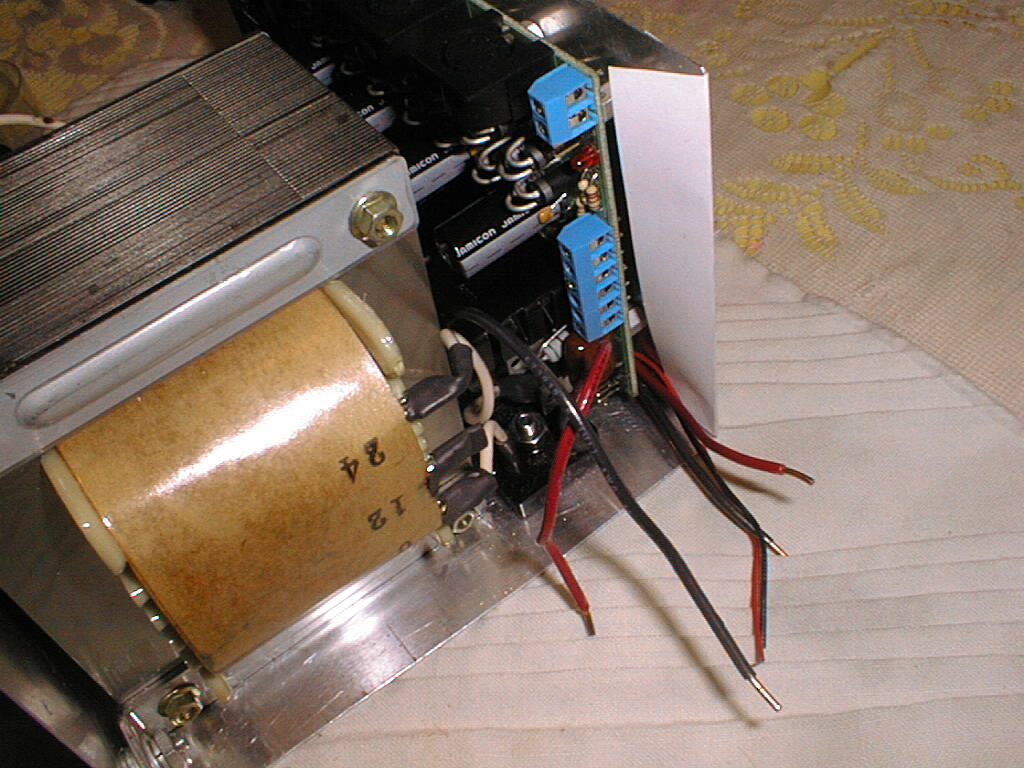
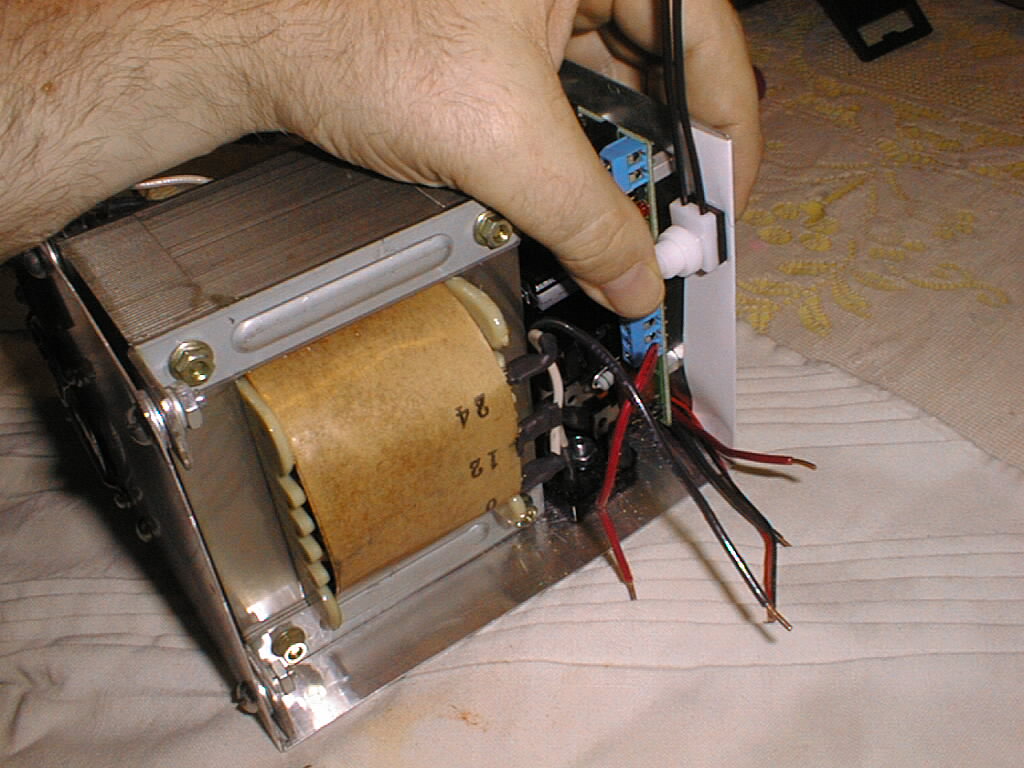
| This shows what the cable looks like after it has been attached to a stepper motor. I skipped the step where I show each connection being made and converted with heat shrink tubing. The final mess is coverted with an even bigger piece of heat shring tubing. |
|
| I just table some paper so that it folds over the edge of the chasis. This is to help place the estop (Emergency Stop) switch. |
|
| Next, I hold the switch on the back side and carefully trace the perimeter of the switch. (Yup, that's my hairy arm!) |
|
| Afterwards the estop switch is traced. Now the paper is flipped out, and I trace the perimeter over to the other side. |
|
| Finally, I drill the hole for the Estop switch. |
|
| The hole for the green power LED is drilled next. It just needs to fit under the PCB board. |
|
| THe hole for the red fault LED is drilled next. |
|
| The Estop switch, power LED, and fault LED are installed in position. When I took this picture, the LED holder for the fault LED was not available. (I forgot to order to of them.) |