This is the Revision D version of the TwinGearSensorLeft RoboBrick. The status of this project is work in progress.
This document is also available in PDF format.
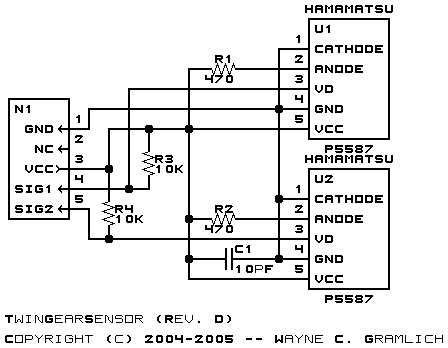
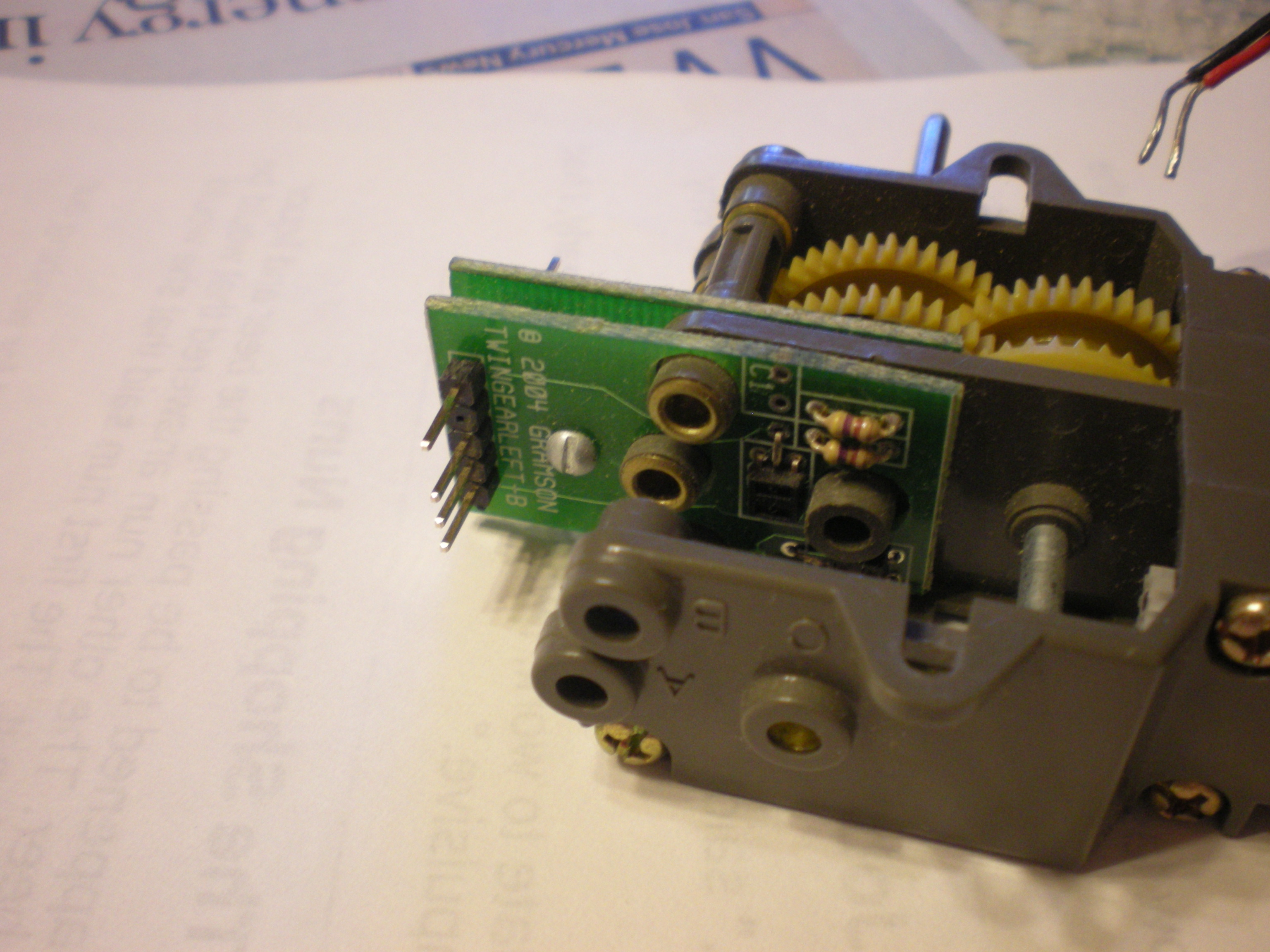
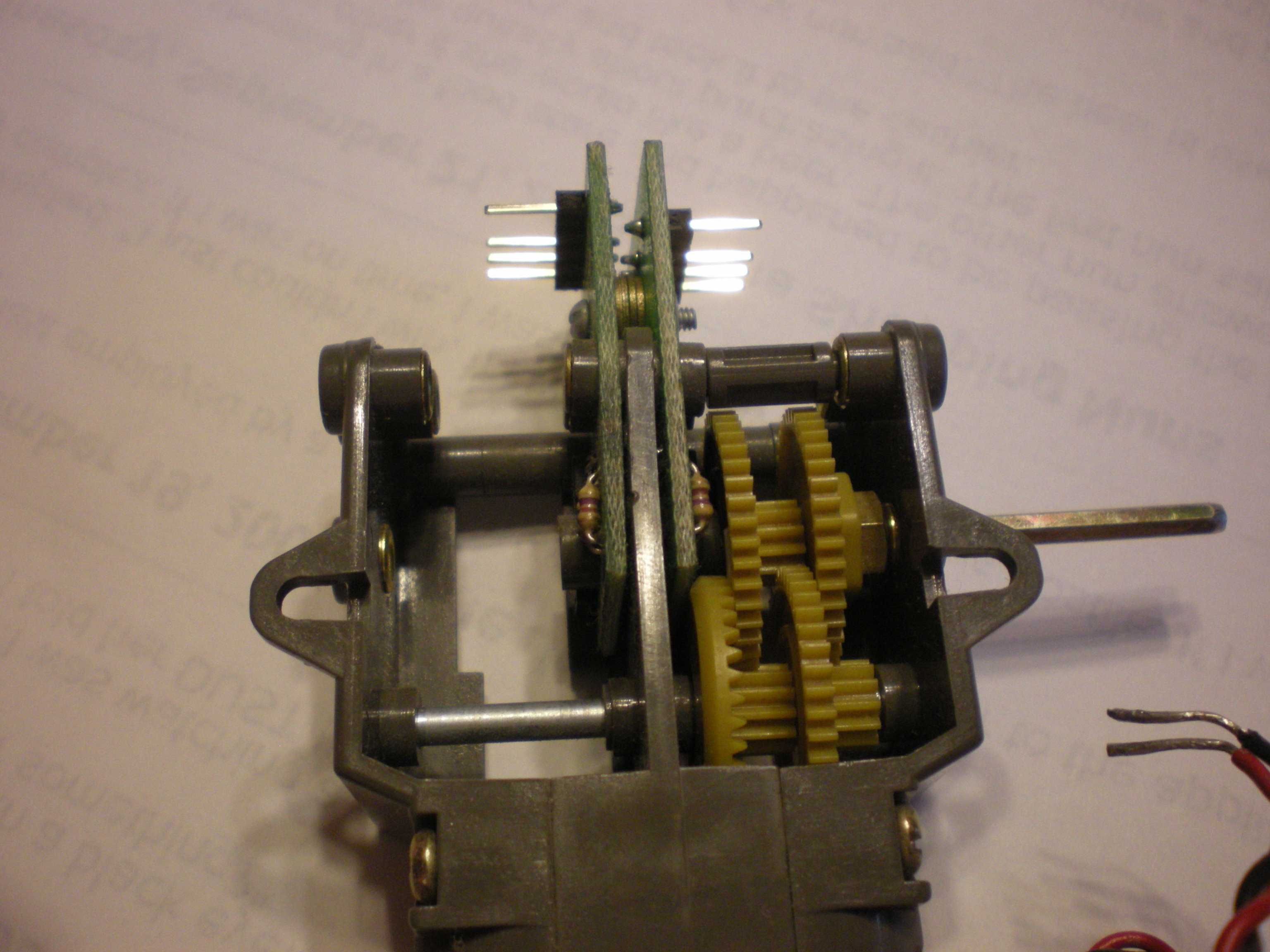
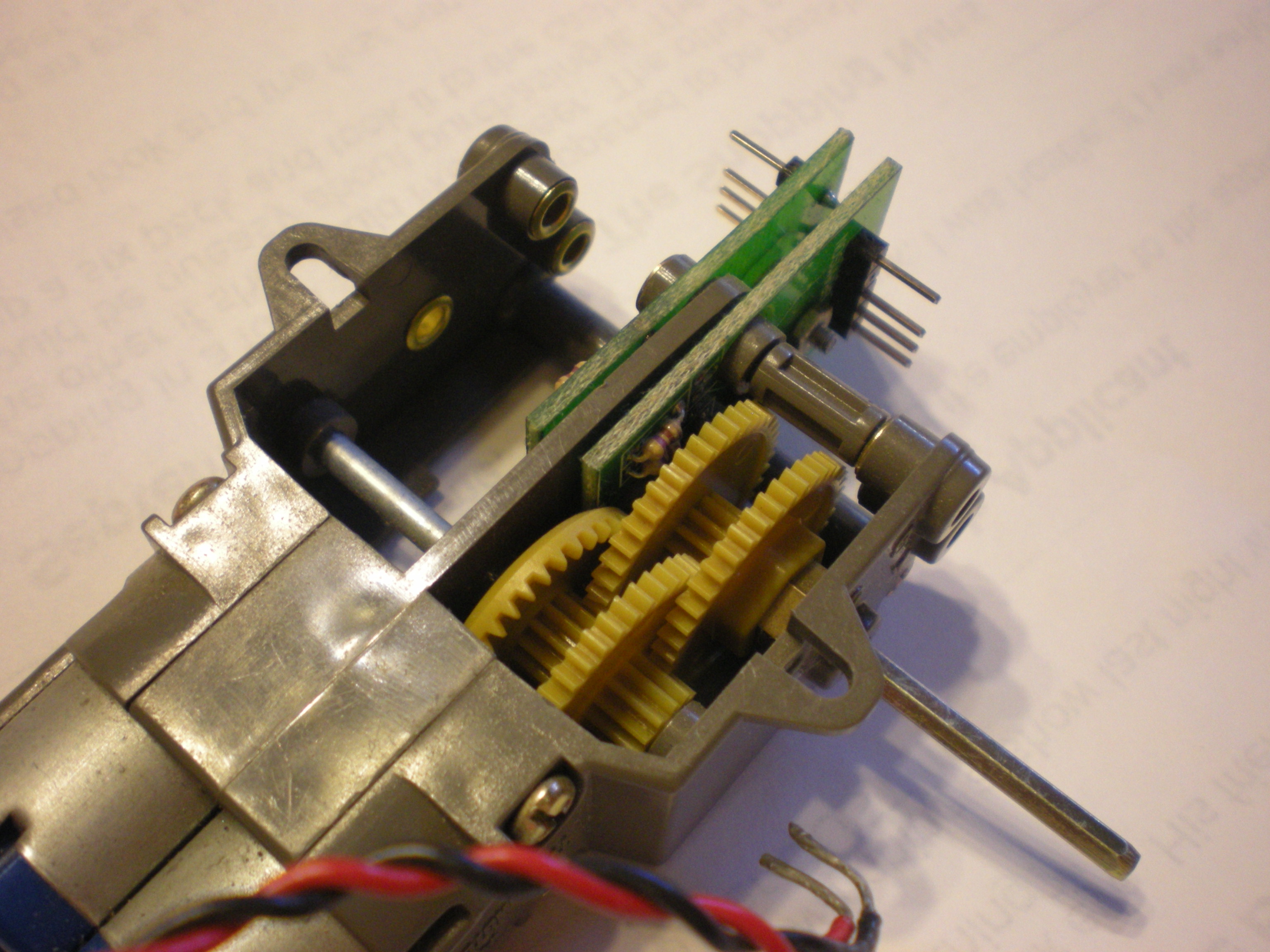
The TwinGearSensorLeft board is designed to pick up a quadrature signal from a shaft using two Hamamatsu P5507 chips.
The hardware consists of a circuit schematic and a printed circuit board.
The schematic for the TwinGearSensorLeft RoboBrick is shown below:
The parts list kept in a separate file -- twingearsensorleft.ptl.
The printed circuit board files are listed below:
Any fabrication issues that come up are listed here.
{kind=link}
{kind=link}
{kind=link}