This is the Revision B verion of the SonarDT1 RoboBrick. The status of this project is finished.
This document is also available as a PDF document.
The Sonar1 RoboBrick is used to provide a RoboBrick interface to the SRF04 sonar range finder from Devantech.
The SonarDT1 RoboBrick is focused on operating the Devantech SRF04. In addition, it has the ability to control 1 servo, so that the SonarDT1 RoboBrick can be mounted on a standard hobby servo as a scanning platform. Lastly, there are some LED's that can provide direct feedback on the current distance being measured by the SRF04. Only the low order 5 bits of the high order byte are shown. (The B revision has a hardware bug that prevents D1 from lighting; this will be fixed in the next revision.)
There are some commands to automatically scan a server back and forth taking readings as it scans. The servo is started at an initial position (see Set/Read Sweep Initial Position.) There is a fixed distance between servo positions (see Set/Read Sweep Increment.) There is a time delay that is used to between changing sweep position that is measured in units of approximiately 20mS (see Set/Read Sweep Delay.) Thers are a total number of different positions that must be less than or equal to 16 (see Set/Read Sweep Positions.) Each time the servo stops a position, a reading is taken and stored into an distance array. The distance array is read using the Read Array High and Low and the Read Array High Only commands. There is a sweep counter that is incremented each time the servo changes directions (see Set/Read Sweep Counter.) Finally, enabling the sweep servo also turns the sonar sensor into continuous measurement mode (See Set/Read Sweep Enable.)
The SonarDT1 commands are summarized in the table below:
Command Send/
ReceiveByte Value Discussion 7 6 5 4 3 2 1 0 Read Distance Low Send 0 0 0 0 0 0 0 0 Return the low order byte llllllll of the distance Receive l l l l l l l l Read Distance High Send 0 0 0 0 0 0 0 1 Return the high order byte hhhhhhhh of the distance Receive h h h h h h h h Read Distance High and Low Send 0 0 0 0 0 0 1 0 Return the low and high order bytes llllllll hhhhhhhh of the distance Receive l l l l l l l l Receive h h h h h h h h Trigger Distance Measure Send 0 0 0 0 0 0 1 1 Trigger a Single Distance Measurement Disable Servo Send 0 0 0 0 0 1 0 0 Disable Servo Enable Servo Send 0 0 0 0 0 1 0 1 Enable Servo Disable Continuous Measurement Send 0 0 0 0 0 1 1 0 Disable Continuous Measurement Enable Continuous Measurement Send 0 0 0 0 0 1 1 1 Enable Continuous Measurement Increment Servo Send 0 0 0 0 1 0 0 0 Increment servo position by one. Decrement Servo Send 0 0 0 0 1 0 0 1 Decrement servo positon by one. Read Servo Send 0 0 0 0 1 0 1 0 Return servo value ssssssss of the distance Receive s s s s s s s s Read Enables Send 0 0 0 0 1 0 1 1 Return servo enable s and continuous distance measurement m Receive 0 0 0 0 0 0 m s Set Servo Low Send 0 0 0 1 l l l l Set the low order 4 bits of the servo position to llll. Set Servo High Send 0 0 1 0 h h h h Set the high order 4 bits of the servo position to hhhh. Set Sweep Initial Position Send 0 1 0 0 0 0 0 0 Set sweep initial position to pppppppp. Send p p p p p p p p Set Sweep Increment Send 0 1 0 0 0 0 0 1 Set the sweep increment to iiiiiiii. Send i i i i i i i i Set Sweep Positions Send 0 1 0 0 0 0 1 0 Set the total number of sweep positions to ppppp (≤16). Send 0 0 0 p p p p p Set Sweep Delay Send 0 1 0 0 0 0 1 1 Set the sweep delay to dddddddd. Send d d d d d d d d Set Sweep Counter Send 0 1 0 0 0 1 0 0 Set the sweep counter to cccccccc. Send c c c c c c c c Set Sweep Enable Send 0 1 0 0 0 1 1 xs. Set the sweep enable to s. Enabling the sweep flag also enables continuous measurement. Read Sweep Initial Position Send 0 1 0 0 1 0 0 0 Read the sweep low position of pppppppp. Receive p p p p p p p p Read Sweep Increment Send 0 1 0 0 1 0 0 1 Read the sweep increment iiiiiiii. Receive i i i i i i i i Read Sweep Positions Send 0 1 0 0 1 0 1 0 Read the total number of sweep positions ppppp. Receive 0 0 0 p p p p p Read Sweep Delay Send 0 1 0 0 1 0 1 1 Read the sweep delay dddddddd. Receive d d d d d d d d Read Sweep Counter Send 0 1 0 0 1 1 0 0 Read the sweep counter cccccccc. Receive c c c c c c c c Read Sweep Enable Flag Send 0 1 0 0 1 1 0 1 Read the sweep enable flag s. Receive 0 0 0 0 0 0 0 s Read Array High and Low Send 0 1 0 1 i i i i Read sonar distance array value at index iiii (≤15). Both the high order and order bytes of hhhhhhhh llllllll are returned. Receive h h h h h h h h Receive l l l l l l l l Read Array High Only Send 0 1 1 0 i i i i Read sonar distance array value at index iiii (≤15). Only high order byte of hhhhhhhh is returned. Receive h h h h h h h h Shared Commands Send 1 1 1 1 1 c c c Execute shared command ccc.
The hardware consists of a circuit schematic and a printed circuit board.
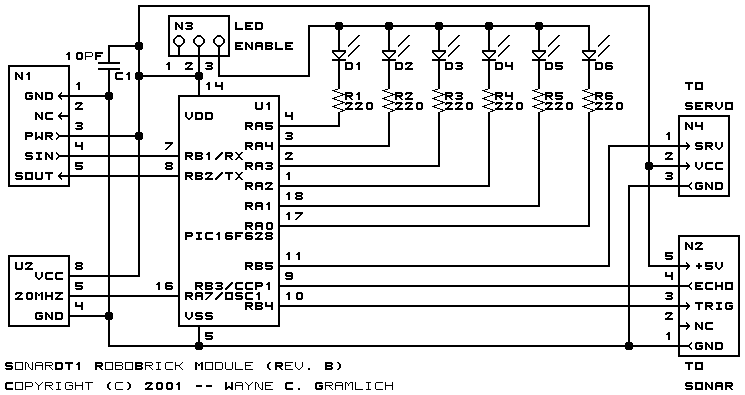
The schematic for the Sonar1 RoboBrick is shown below:
The parts list kept in a separate file -- sonardt1.ptl.
The printed circuit board files are listed below:
The construction instructions are found in a separate file to make them a little more printer friendly.
The software for the SonarDT1 RoboBrick is in the following files:
The following fabrication issues came up: