This is the Revision A verion of the RoboBRiX Irline2 module. The status of this project is work in progress.
This document is also available in PDF format.
The IRLine2 RoboBrix can connect to operate 2 Fairchild® QRB1134 Infrared photorelective sensors. These sensor can detect the difference between light and dark at a distance about 4mm (.15 inches.) Thus, they are excellent for detecting the edges of lines for line following robots. The two QRB1134's are mounted directly on the IRLine2. The board is mounted on edge with the two sensors facing down toward the floor and stradling the line to be followed. The QRB1134 sensers can be moved back and forth across the board edge to accomadate different line widths.
The IRLine2 RoboBrix is continuously reading the analog inputs from its four A/D pins. The controlling program can just read the results of the digital conversion, or it can have the result down converted into a single binary bit. Each pin has has a threshold high and threshold low register that is used for the down conversion. Whenever the digital conversion exceeds the high threshold register, the down coversion results in a 1. Whenever the digital conversion is lower than the low threshold register, the down conversion results in a 0. A hysterisis effect can be introduced by having some spread between the high and low threshold values.
After the down coversions to binary bits, the result is 4-bits of binary data. A complement mask can be used to selectively invert individual bits in the 4-bit data.
The IRLine2 RoboBrix supports RoboBrix Interrupt Protocol for those lines that are being used as inputs. The interrupt pending bit is set whenever the the formula:
L&(~I) | H&I | R&(~P)&I | F&P&(~I)is non-zero, where:
In addition to the common shared commands and the shared interrupt commands, the IRLine2 RoboBrix supports following commands:
| Command | Send/ Receive |
Byte Value | Discussion | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |||
| Read Pin | Send | 0 | 0 | 0 | 0 | 0 | 0 | b | b | Read pin bb and respond with 8-bit value vvvvvvvv |
| Receive | v | v | v | v | v | v | v | v | ||
| Read Binary Values | Send | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | Return the binary values abcd (after XOR'ing with complement mask) |
| Receive | 0 | 0 | 0 | 0 | a | b | c | d | ||
| Read Raw Binary | Send | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | Return the raw binary values abcd (no XOR with complement mask) |
| Receive | 0 | 0 | 0 | 0 | a | b | c | d | ||
| Reset | Send | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | Reset everything to zero |
| Read Complement Mask | Send | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | Return the complement mask cccc |
| Receive | 0 | 0 | 0 | 0 | c | c | c | c | ||
| Read High Mask | Send | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | Return the high mask hhhh |
| Receive | 0 | 0 | 0 | 0 | h | h | h | h | ||
| Read Low Mask | Send | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | Return the high mask llll |
| Receive | 0 | 0 | 0 | 0 | l | l | l | l | ||
| Read Raising Mask | Send | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | Return the raising mask rrrr |
| Receive | 0 | 0 | 0 | 0 | r | r | r | r | ||
| Read Falling Mask | Send | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | Return the falling mask ffff |
| Receive | 0 | 0 | 0 | 0 | f | f | f | f | ||
| Read High Threshold | Send | 0 | 0 | 0 | 1 | 0 | 0 | b | b | Return high threshold for pin bb of hhhhhhhh |
| Receive | h | h | h | h | h | h | h | h | ||
| Read Low Threshold | Send | 0 | 0 | 0 | 1 | 0 | 1 | b | b | Return low threshold for pin bb of llllllll |
| Receive | l | l | l | l | l | l | l | l | ||
| Set High Threshold | Send | 0 | 0 | 0 | 1 | 1 | 0 | b | b | Set high threshold for pin bb to hhhhhhhh |
| Send | h | h | h | h | h | h | h | h | ||
| Set Low Threshold | Send | 0 | 0 | 0 | 1 | 1 | 1 | b | b | Set low threshold for pin bb to llllllll |
| Send | l | l | l | l | l | l | l | l | ||
| Set Complement Mask | Send | 0 | 0 | 1 | 0 | c | c | c | c | Set complement mask to cccc |
| Set High Mask | Send | 0 | 1 | 0 | 0 | h | h | h | h | Set high mask to hhhh |
| Set Low Mask | Send | 0 | 1 | 0 | 1 | l | l | l | l | Set low mask to llll |
| Set Raising Mask | Send | 0 | 1 | 1 | 0 | r | r | r | r | Set raising mask to rrrr |
| Set Falling Mask | Send | 0 | 1 | 1 | 1 | f | f | f | f | Set falling mask to ffff |
| Read Interrupt Bits | Send | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | Return the interrupt pending bit p and the interrupt enable bit e. |
| Receive | 0 | 0 | 0 | 0 | 0 | 0 | e | p | ||
| Set Interrupt Commands | Send | 1 | 1 | 1 | 1 | 0 | c | c | c | Set Interrupt Command ccc. |
| Shared Commands | Send | 1 | 1 | 1 | 1 | 1 | c | c | c | Execute common shared command ccc |
The hardware consists of a circuit schematic and a printed circuit board.
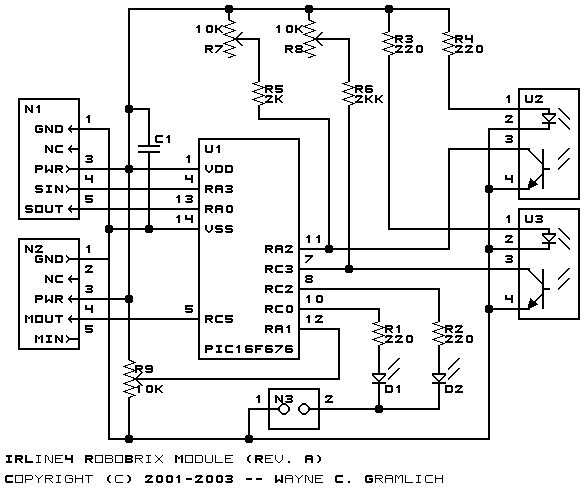
The schematic for the IRLine2 RoboBrix is shown below:
The parts list kept in a separate file -- irline2.ptl.
The printed circuit board files are listed below:
The construction instructions are in a separate file to be a little more printer friendly.
The IRLine2 software is available as one of:
The IRLine2 test software is available as one of:
Any fabrication issues will be listed here.