The RoboBrick CDBot is a test platform for the RoboBricks project. The status of this project is work in progress.
Bill took one of his robots built out of CD's and hacked it to be run using RoboBricks. It looks like a Rube Goldberg contraption (frankly, it is), but functions quite nicely as a line follower.
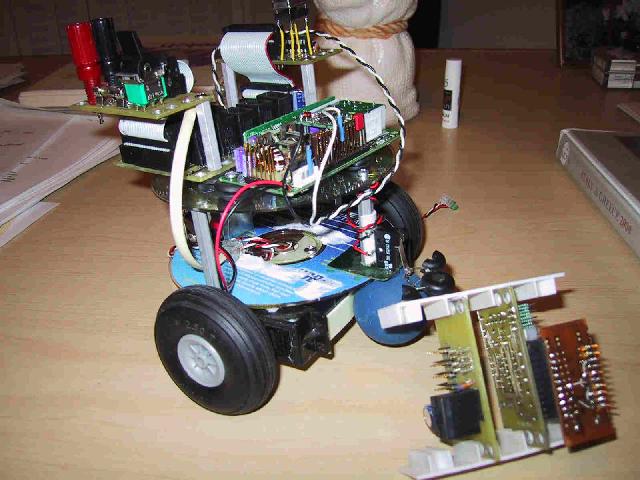
The picture below is of the entire robot. Locomotion is via two hacked hobby servo motors with model model airplane wheels. The Hub8 RoboBrick is on the second level in back. The Bench RoboBrick is on the third level to the left. The PIC16F876 RoboBrick is on the third level to the right. The DC/DC power supply is on the second level in the front. The Threshold4 and Servo4 RoboBricks are on the assembly in front that has not been attached yet. The battery pack will slide between the first and second levels.
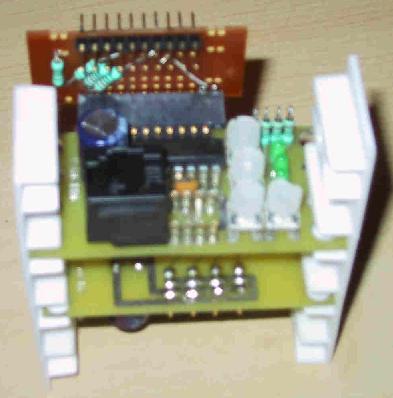
The picture below is just a closer picture of the Threshold4 and Servo4 RoboBrick. The brown board has some resistors needed to bias the line follower sensors.
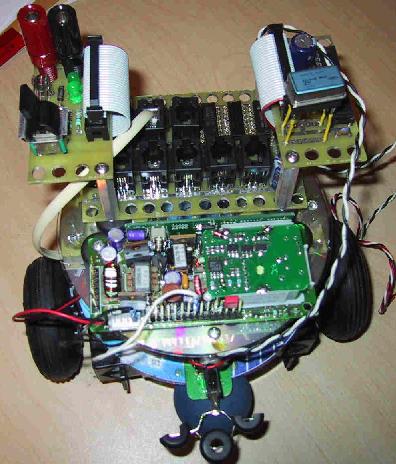
The picture below is a top view of the robot. Yes, the oscillator on the PIC16F876 board is up on stilts. (We had a little interference problem.)
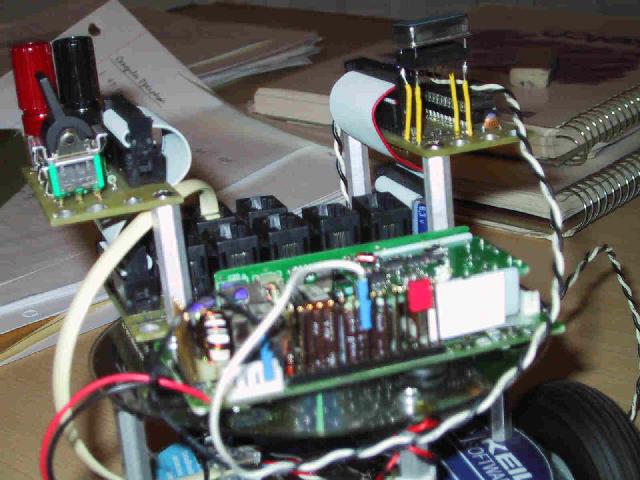
Picture below is a close up picture of the DC/DC power supply and the Hub8 RoboBrick.
The software is a seriously hacked up version the the PIC16F876 boot loader called line.ucl.