This is the Revision A verion of the BS2Hub8 RoboBrick. The status of this project is that it has been replaced by the Revision C version.
This document is also available as a PDF document.
The BS2Hub8 RoboBrick is a master RoboBrick that can control up to 8 slave RoboBricks. It is controlled by a Basic Stamp 2® from Parallax. It has two terminals that can be connect to a battery between 6 and 9 volts. It has an on board 5 volt voltage regulator to provide power to the slave RoboBricks. The is a connector that can be connected to a DB9 connector and used to communicate with a controlling PC via RS-232 voltage levels.
We may eventually put a few examples of programming the BS2Hub8 RoboBrick here. Basically, it is programmed using the Parallax Basic for the Basic Stamp 2.
' Even numbered pins inputs and odd number pins are outputs.
' (Remember for the BS2, 1=output and 0=input.)
dirs = $aaaa
' Set all outputs to high:
high 1
high 3
high 5
high 7
high 9
high 11
high 13
high 15
' To copy a Switch8-B (on N2) to LED10-B (on N1):
switches var byte
loop:
' Send command 0 (Read switches) to Switch8-B:
serout 11, 396, [0]
' Receive the switch readings from Switch8-B:
serin 10, 396, [switches]
' Send switch values to LED10-B:
serout 9, 396, [switches]
goto loop
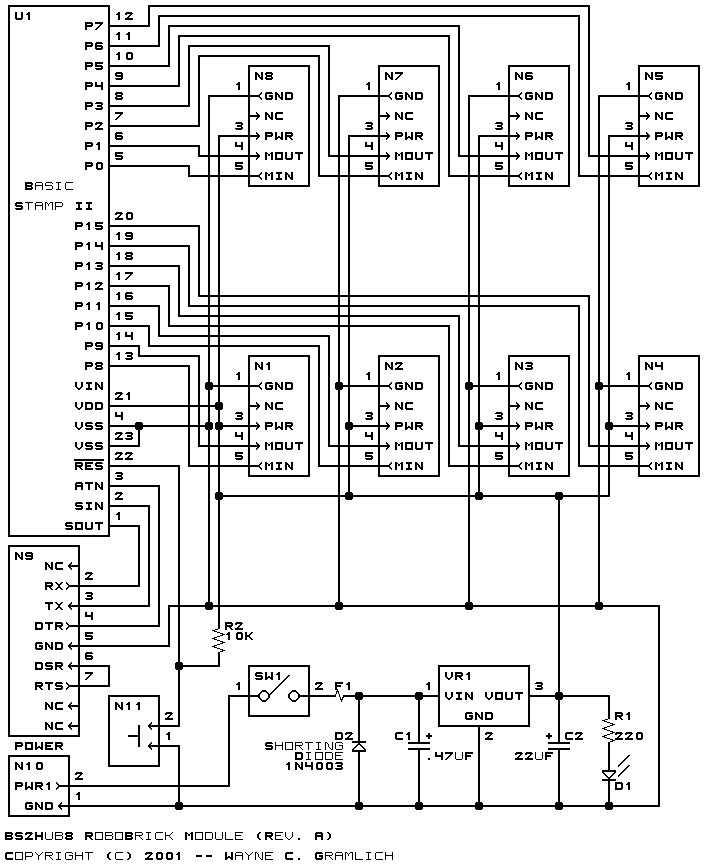
The hardware consists of a circuit schematic and a printed circuit board.
The schematic for the BS2Hub8 RoboBrick is shown below:
The parts list kept in a separate file -- bs2hub8.ptl.
The printed circuit board files are listed below:
There is no software for the BS2Hub8 RoboBrick yet.
The following fabrication issues came up: