This is the Revision B verion of the
Laser1 Module.
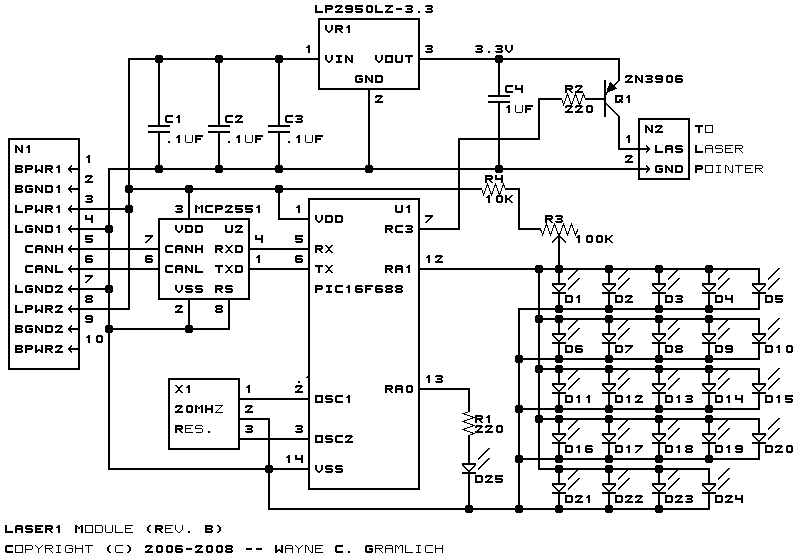
Laser1 Module (Revision B)
This document is also available in
PDF format.
The Laser1 module provides the basis for a laser
bearing finder. This module must be placed on
a platform that can swivel in place. This module
can detect reflected back laser beam energy at
supstantial distances (10+ meters.) Reflective
tape makes an excellent laser reflector. Please
check the
references section for more information.
In particular,
[Ubersitzig1999] is the root seriels of articles
that motivates the desire for this sensor.
There is no programming yet.
The hardware consists of a circuit schematic and
a printed circuit board.
The schematic for the Laser1 Module is shown below:
The parts list kept in a separate file --
laser1.ptl.
The printed circuit board files are listed below:
-
laser1_back.png
-
The solder side layer.
-
laser1_front.png
-
The component side layer.
-
laser1_artwork.png
-
The artwork layer.
-
laser1.gbl
-
The RS-274X "Gerber" back (solder side) layer.
-
laser1.gtl
-
The RS-274X "Gerber" top (component side) layer.
-
laser1.gal
-
The RS-274X "Gerber" artwork layer.
-
laser1.drl
-
The "Excellon" NC drill file.
-
laser1.tol
-
The "Excellon" tool rack file.
There is no software yet.
Any fabrication issues are listed here.
-
The hole for the laser beam is too small.
-
The alignment holes are too small for any
reasonable hardware.
-
The alignment holes are too close, move
further out.
-
[AcronameServo]
-
Modifying Servos for Continuous Rotation.
Published online by
Acroname at URL:
http://www.acroname.com/robotics/info/ideas/continuous/continuous.html.
-
[Bertke1994]
-
Mobile Robot Localization Using Landmarks
by Margrit Bertke and Leonid Gurvits in the
proceedings of the 1994 International
Conference on Intelligent Robots and Systems
(IROS '94), pages 135-142. URL:
http://www.umiacs.umd.edu/~betke/#landmarkpaper
-
[Borenstein1996]
-
"Where am I?" -- Systems and Methods
for Mobile Robot Positioning by
J. Borenstein, H. R. Everett, and L. Feng
published by A. K. Peters, Ltd.
ISBN: 156881058X. An on-line version of
the paper is available at URL:
http://www.eecs.umich.edu/~johannb/pos96rep.pdf.
Note: There is a slightly different 1995 edition
entitled Navigating Mobile Robots: Systems
and Techniques that is out of print
ASIN: 1568810660 .
-
[Buse2000]
-
Variable Speed Control Modification to the
Futaba S3003 RC Servo by Lee Buse
published in the
September 2000 issue of the
Seattle Robotics
Encoder. URL:
http://www.seattlerobotics.org/encoder/200009/S3003C.html.
-
[McGillem1989]
-
A Beacon Navigation Method for Autonomous
Vehicles by Clare D. McGillem and Theodore
S. Rappaport published in IEEE Transactions
on Vehicular Technology Vol. 38 No. 3 August
1989, pages 132-139. Note: The algorithm proper
can be found in equations (7) through (16).
The derivation of the algorithm can be found in
the appendix. In additin, I have written a
C program that implements the described
algorithm.
-
[Ubersitzig1999]
-
A Circular Navigation System written by
Jim Ubersetzig, published in three parts in the
September,
October, and
November 1999 issues of
The Robot Builder newsletter of the
Robotics Society of Southern California. URL:
http://www.rssc.org/.
Note: At the end of the third part of the series,
there is mention of a continuation of the article
(part 4) in the next month of "The Robot Builder";
to the best of our knowledge this continuation
article has not actually been published.
-
[Vannoy2001]
-
Accurate Autonomous Robot Laser Navigation
Using Only Passive Reflectors by Richard T.
Vannoy II published in the
September 2001 issue of the
Seattle Robotics
Encoder. URL:
http://www.seattlerobotics.org/encoder/200109/lasernav.htm.
Copyright © 2006-2008 by
Wayne C. Gramlich.
All rights reserved.