This is revision A of the Bumper14 module.
The Bumper14 module provides 14 inputs for simple electrical switch closures.
Command
NameAction Bit Description 8 7 6 5 4 3 2 1 0 Common
CommandsSend 0 1 1 1 1 1 x x x Standard common command. See specifications for details. Receive 0 a a a a a a a a Select Send 1 a a a a a a a a Select the module with an address of aaaa aaaa. A time-out indicates that the module is not selected; otherwise 1010 0101 (0xa5) is returned to indicate a successful selection. Receive 0 1 0 1 0 0 1 0 1
The hardware consists of a circuit schematic and a printed circuit board.
The parts list kept in a separate file -- bumper14.ptl.
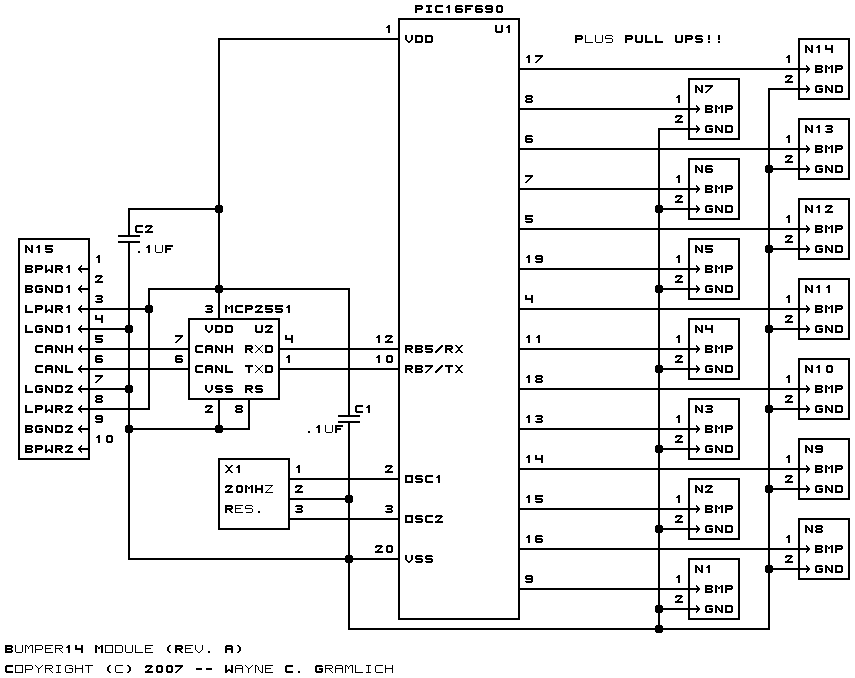
The schematic for the Bumper14 module is shown below:
The bus is connected to the 2×5 shrouded conenctor N9. The two CAN bus signals are fed into the PCP2551 CAN bus transceiver U2. The output of U2 is fed to the UART transmit and receive signals on the PIC16F688 microcontroller U1. 8-pins of the U1 are connected to 1×3; polarized .1" male headers. Each pin is connected to one of the anlog inputs on U1. A half size crystal oscillator (X1) is used to provide the reference 20MHz signal. A resonator could not be used since it requires pins 2 and 3 of U1, and pin 3 is needed for a analog input (AN3).
The printed circuit board files are listed below:
The following files are available:
Any fabrication issues will be listed here.