This is the Revision A verion of the
IRDistance1_Standoff RoboBrick. The status of this project is
work in progress.
IRDistance1_Standoff Robobrick (Revision A)
This document is also available in
PDF format.
The IRDistance1_Standoff is used to mount the GP2D120
sensor for an
IRDistance1 module.
The hardware consists of a circuit schematic and
a printed circuit board.
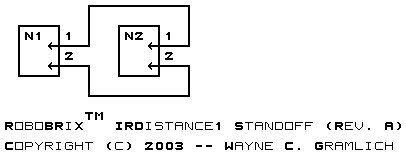
The schematic for the IRDistance1_Standoff RoboBrick
is shown below:
The parts list kept in a separate file --
irdistance1_standoff.ptl.
The printed circuit board files are listed below:
-
irdistance1_standoff_back.png
-
The solder side layer.
-
irdistance1_standoff_front.png
-
The component side layer.
-
irdistance1_standoff_artwork.png
-
The artwork layer.
-
irdistance1_standoff.gbl
-
The RS-272X "Gerber" back (solder side) layer.
-
irdistance1_standoff.gtl
-
The RS-272X "Gerber" top (component side) layer.
-
irdistance1_standoff.gal
-
The RS-272X "Gerber" artwork layer.
-
irdistance1_standoff.drl
-
The "Excellon" NC drill file.
-
irdistance1_standoff.tol
-
The "Excellon" tool rack file.
Any fabrication issues will be listed here.
Copyright (c) 2001-2003 by
Wayne C. Gramlich.
All rights reserved.