This is the Revision A version of the Activity4 RoboBrick. The status of this project is that it has been replaced by the Activiity9 RoboBrick.
This document is also available as a PDF document.
The Activity4 RoboBrick is used to detect communication activity between two RoboBricks.
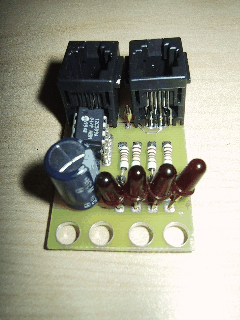
A picture of the Activity4-A RoboBrick is shown below:
There is no programming per se for the Activity4 RoboBrick. Inside the Activity4 RoboBrick there are two counters -- one that counts bytes of traffic from the master to the slave and vice versa. The Activity RoboBrick takes the least significant two bits of each counter and displays them. Thus, when the LED's are flickering there is traffic going on. For short messages, the user can count individual bytes going between the modules. The left most 2-bits are for master to slave traffic and the right most 2-bits are for slave to master traffic.
The hardware consists of a circuit schematic and a printed circuit board.
The schematic for the Activity4 RoboBrick is shown below:
The parts list kept in a separate file -- activity4.ptl.
The printed circuit board files are listed below:
The Activity4 software is available as one of:
The following issues have come up:
